Advanced Image Utilities
Overview
This page provides advanced image utilities code snippets for Project Aria Tools, see also Image Code Snippets.
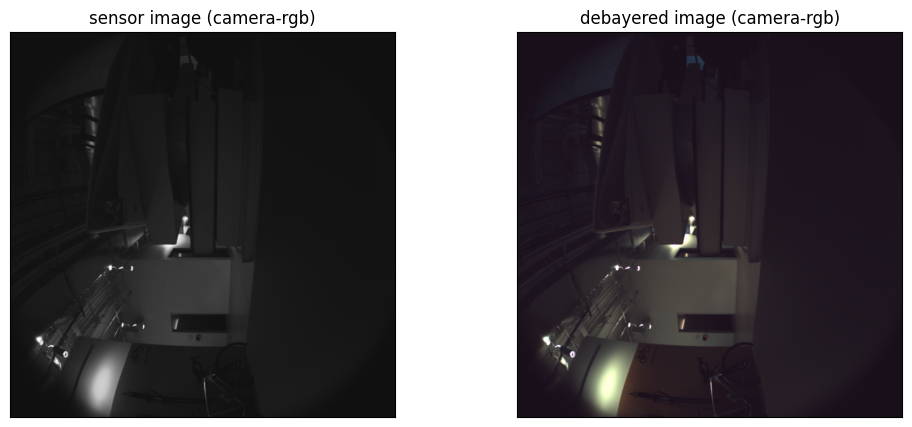
Image debayer
Some recording profiles outputs raw RGB images (Profile 7 in Recording Profile). We provide functionalities to debayer them and perform white-balancing to get RGB images.
- Python
- C++
from projectaria_tools.core import data_provider, image
stream_id = provider.get_stream_id_from_label("camera-rgb")
image_data = provider.get_image_data_by_index(stream_id, 0)
image_data_array = image_data[0].to_numpy_array()
debayered_array = image.debayer(image_data_array)
#include <dataprovider/VrsDataProvider.h>
#include <image/utility/Debayer.h>
auto streamId = provider.getStreamIdFromLabel("camera-rgb");
auto imageData = provider.getImageDataByIndex(streamId, 0);
auto debayeredImage = debayer(imageData.first.imageVariant());
See projectaria_tools/core/image/utility/Debayer.cpp for implementation
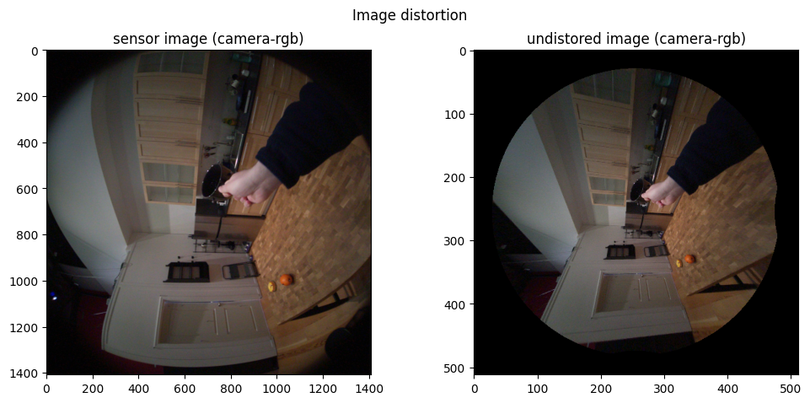
Image undistortion
In this example, we remove distortions in raw sensor data so that straight 3D lines appear straight in the undistorted images. There is existing C++ implementation and Python wrapper of this helper function in the data utilities.
- Python
- C++
from projectaria_tools.core import data_provider, calibration
camera_label = "camera-slam-left"
stream_id = provider.get_stream_id_from_label(camera_label)
calib = provider.get_device_calibration().get_camera_calib(camera_label)
pinhole = calibration.get_linear_camera_calibration(512, 512, 150)
raw_image = provider.get_image_data_by_index(stream_id, 0)[0].to_numpy_array()
undistorted_image = calibration.distort_by_calibration(raw_image, pinhole, calib)
#include <dataprovider/VrsDataProvider.h>
#include <calibration/utility/Distort.h>
std::string cameraLabel = "camera-rgb";
vrs::StreamId streamId = provider->getStreamIdFromLabel(cameraLabel);
CameraCalibration calib = provider->getCameraCalibration(streamId);
CameraCalibration pinhole = getLinearCameraCalibration(512, 512, 150);
ImageData rawImage = provider->getImageDataByIndex(streamId, 0);
auto undistortedImage = distortByCalibration(rawImage.imageVariant(), pinhole, calib);
Go to projectaria_tools/core/calibration/utility/Distort.cpp for implementation.
Go to the Project Aria FAQ for more calibration information and resources.
Rotated image clockwise 90 degrees
In this example, we rotated the RGB image 90 degrees and provide the new calibration object.
- Calibration rotation only applies to pinhole camera model
- Pinhole camera calibration object needs to be initialized as
pinhole = calibration.get_linear_camera_calibration(512, 512, 150, camera_label, calib.get_transform_device_camera())withcamera_labeland the posecalib.get_transform_device_camera()so thatpinhole_cw90can have the correct transformation matrix when unprojecting a pixel to getray_in_device_frame.
- Python
- C++
camera_label = "camera-rgb"
stream_id = provider.get_stream_id_from_label(camera_label)
calib = provider.get_device_calibration().get_camera_calib(camera_label)
pinhole = calibration.get_linear_camera_calibration(512, 512, 150, camera_label,
calib.get_transform_device_camera())
raw_image = provider.get_image_data_by_index(stream_id, 0)[0].to_numpy_array()
undistorted_image = calibration.distort_by_calibration(raw_image, pinhole, calib)
# Rotated image by CW90 degrees
rotated_image = np.rot90(undistorted_image, k=3)
# Get rotated image calibration
pinhole_cw90 = calibration.rotate_camera_calib_cw90deg(pinhole)
# Unproject a pixel and get a ray from device coordinate frame
test_pixel_in_rotated_image = [10,0]
ray_in_device_frame = pinhole_cw90.get_transform_device_camera() @ pinhole_cw90.unproject_no_checks(test_pixel_in_rotated_image)
#include <dataprovider/VrsDataProvider.h>
#include <calibration/utility/Distort.h>
std::string cameraLabel = "camera-rgb";
vrs::StreamId streamId = provider->getStreamIdFromLabel(cameraLabel);
CameraCalibration calib = provider->getCameraCalibration(streamId);
CameraCalibration pinhole = getLinearCameraCalibration(512, 512, 150, cameraLabel, calib.getT_Device_Camera());
// Get rotated image calibration
CameraCalibration pinholeCW90 = rotatedCameraCalibCW90Deg(pinhole);
// Unproject a pixel and get a ray from device coordinate frame
Eigen::Vector2d textPixelInRotatedImage{10,0};
auto ray = pinholeCW90.getT_Device_Camera() * pinholeCW90.projectNoChecks(textPixelInRotatedImage);
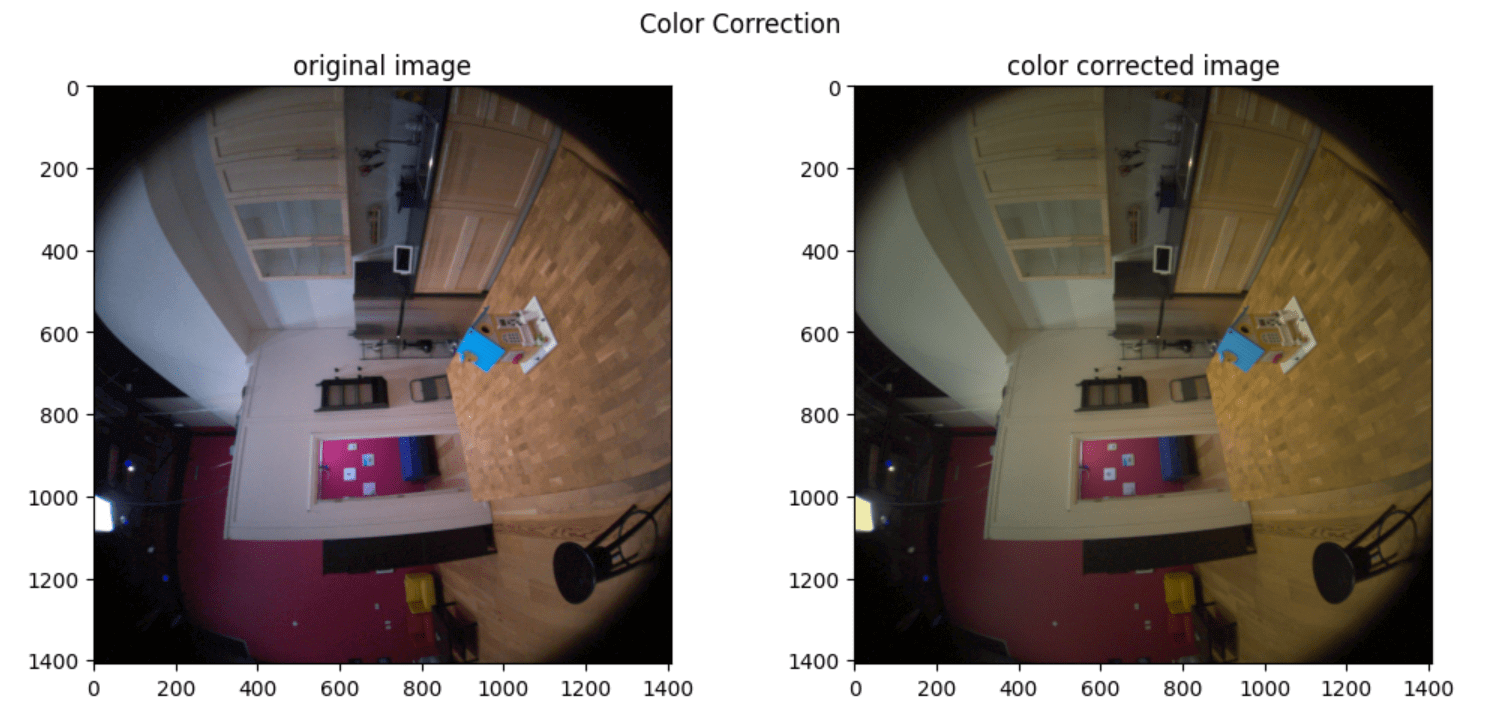
Color Correction
Videos and images taken with earlier versions of the Aria OS may show color distortion due to inconsistent gamma curves and unconventional color temperatures, leading to inconsistent and overly blue hues. To address this, we've introduced a Color Correction feature in the ARK v1.13 update. With this update, images captured by Aria devices now have more consistent colors and are calibrated to a standard color temperature of 5000K. We also recommend applying devignetting to the images to achieve more accurate image quality.
Color Correction user recommendations
The new Color Correction feature is available as an option in data campaigns and the Companion App. It's enabled by default in the new Aria OS, and we recommend users utilize the feature for future Aria captures to achieve optimal image quality. We also suggest keeping existing images captured with the old Aria OS and combining them with new Aria captures for research purposes. For advanced users, we provide a Color Correction API in Project Aria Tools that can correct color distortions in old captures and images. We advise using this API with caution for the following reasons:
- The post-processing API can effectively convert and correct color distortion in older images, particularly in environments that are not overexposed. If your images do not contain overexposed areas, we recommend converting them for optimal image quality.
- If an image contains overexposed areas, the colors in the overexposed regions may be oversaturated due to distortion in color settings: this may make it impossible to accurately recover the proper colors, potentially resulting in artifacts. This is more common in outdoor environments, where oversaturated areas can appear around the sky or sun. In such cases, we recommend retaining the old images without converting them.
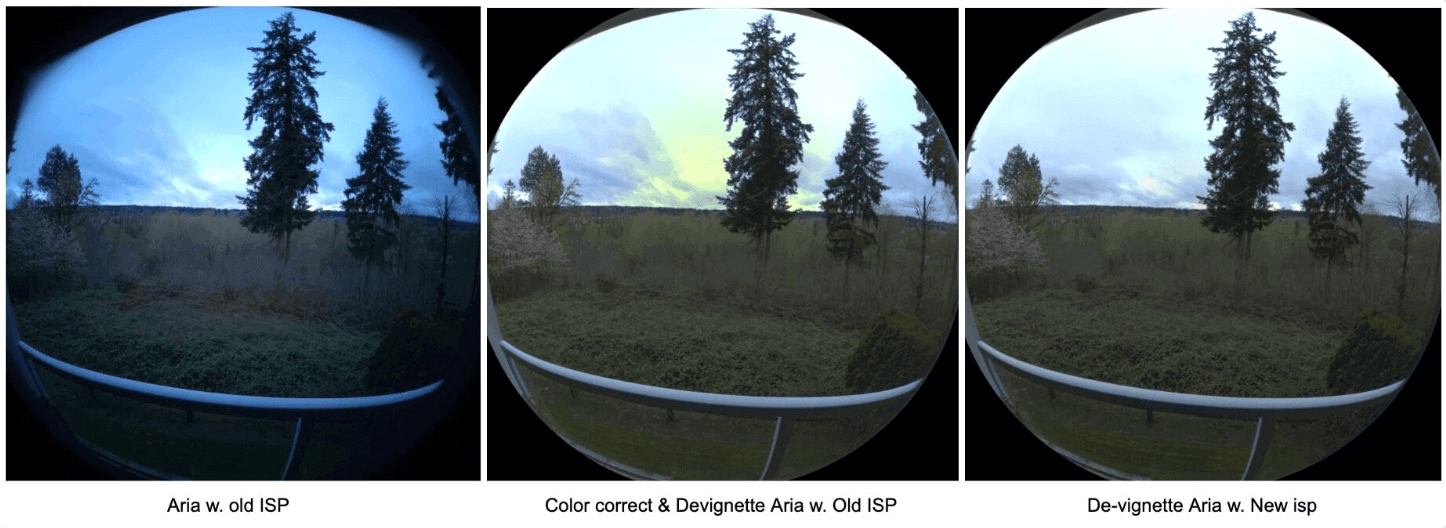
Potential failure cases
The issue with overexposed captures is demonstrated in the picture below. In the left image, captured by the old Aria OS, the central area is oversaturated due to strong light around the sun, resulting in the loss of digital values above 255 for higher-range colors. These lost colors cannot be recovered. The middle image, where the old image has been color-corrected and devignetted, displays a yellowish tint after the color correction conversion due to the original image's oversaturation. This problem does not occur in images captured with the updated Aria OS, shown in the right image.
Below, we demonstrate how to apply color correction:
- Set set_color_correction as True (the default value is False).
- The output from provider.get_image_data_by_index would be color-corrected.
- Python
- C++
from projectaria_tools.core import data_provider
camera_label = "camera-rgb"
stream_id = provider.get_stream_id_from_label(camera_label)
# turn on color correction
provider.set_color_correction(True)
# the output image from get_image_data_by_index will be color corrected
color_corrected_image_array = provider.get_image_data_by_index(stream_id, 0)[0].to_numpy_array()
#include <dataprovider/VrsDataProvider.h>
std::string cameraLabel = "camera-rgb";
vrs::StreamId streamId = provider->getStreamIdFromLabel(cameraLabel);
// turn on color correction
provider.setColorCorrection(True);
// the output image from getImageDataByIndex will be color corrected
ImageDataAndRecord imageDataAndRecord = provider.getImageDataByIndex(streamId, 0);
 Go to projectaria_tools/core/image/utility/ColorCorrect.cpp for implementation.
Go to projectaria_tools/core/image/utility/ColorCorrect.cpp for implementation.
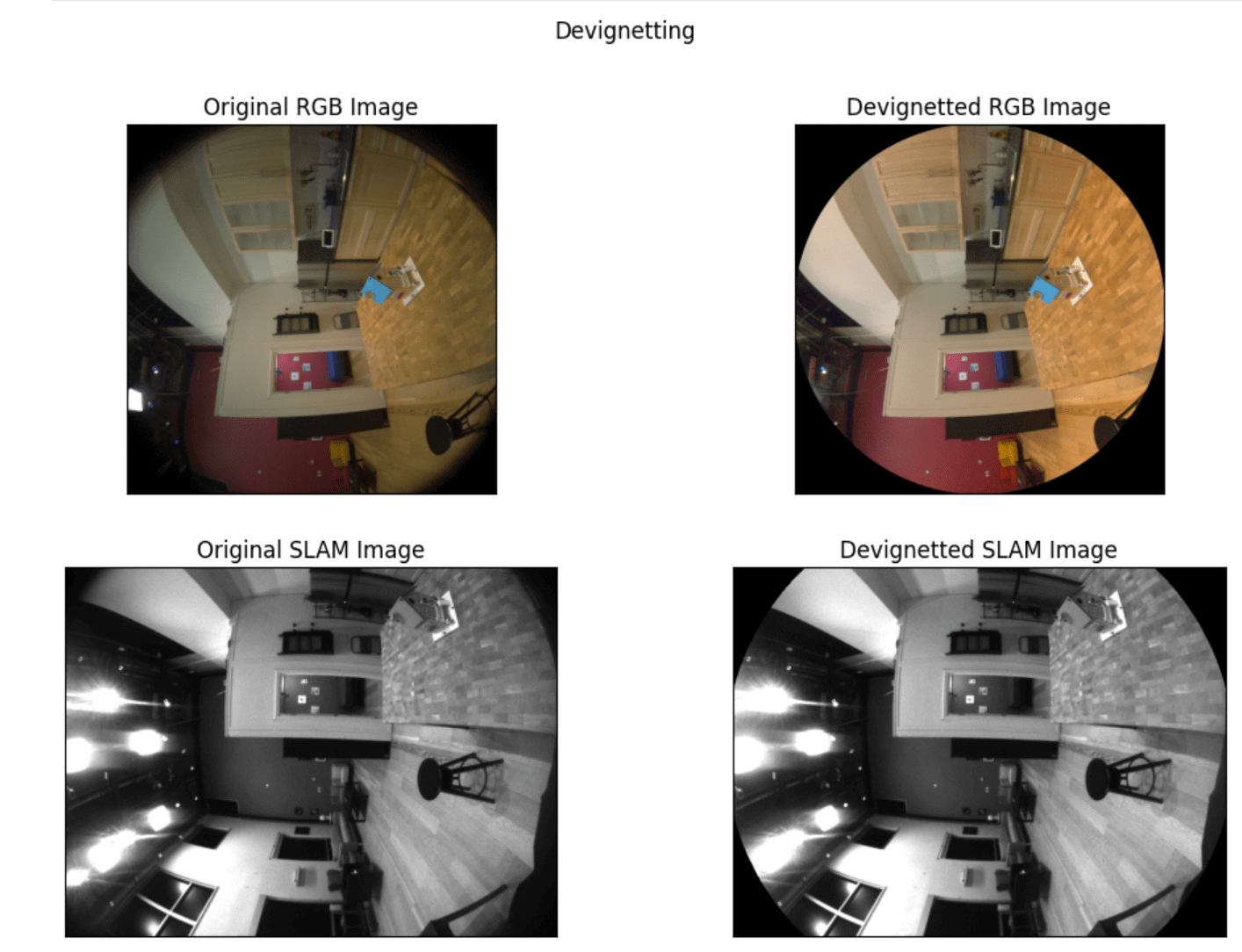
Image devignetting
Devignetting corrects uneven lighting, enhancing image uniformity and clarity. We provide devignetting for camera-rgb full size image [2880, 2880], camera-rgb half size image[1408, 1408] and slam image [640, 480].
- Download Aria devignetting masks containing following files:
devignetting_masks_bin
|- new_isp
|- slam_devignetting_mask.bin
|- rgb_half_devignetting_mask.bin
|- rgb_full_devignetting_mask.bin
|- old_isp
|- slam_devignetting_mask.bin
|- rgb_half_devignetting_mask.bin
|- rgb_full_devignetting_mask.bin
- Turn on devignetting. Set devignetting mask folder path with the local aria camera devignetting masks folder path.
set_devignetting(True)mask_folder_path = "devignetting_masks_bin"set_devignetting_mask_folder_path(mask_folder_path)
- The image data from
get_image_data_by_indexwill be devignetted. - (Optional) If you don't want to devignetting feature, turn off by calling
set_devignetting(False)
- Python
- C++
from projectaria_tools.core import data_provider
camera_label = "camera-rgb"
stream_id = provider.get_stream_id_from_label(camera_label)
# set devignetting mask path
devignetting_mask_folder_path = <FOLDER_PATH_CONTAINING_DEVIGNETTING_MASK>
provider.set_devignetting_mask_folder_path(devignetting_mask_folder_path)
# turn on devignetting
provider.set_devignetting(True)
# the output image from get_image_data_by_index will be devignetted
devignetted_image = provider.get_image_data_by_index(stream_id, 0)
#include <dataprovider/VrsDataProvider.h>
std::string cameraLabel = "camera-rgb";
vrs::StreamId streamId = provider->getStreamIdFromLabel(cameraLabel);
std::string devignettingMaskFolderPath = <FOLDER_PATH_CONTAINING_DEVIGNETTING_MASK>;
// set devignetting mask path
provider.setDevignettingMaskFolderPath(devignettingMaskFolderPath);
// turn on devignetting
provider.setDevignetting(true);
// the output image from getImageDataByIndex will be devignetted
ImageDataAndRecord imageDataAndRecord = provider.getImageDataByIndex(streamId, 0);
Go to projectaria_tools/core/image/utility/Devignetting.cpp for implementation.