Troubleshooting¶
Cannot connect to Franka Robot¶
Refer to libfranka docs here.
Motion stopped due to discontinuities or communication_constraints_violation¶
The robot expects a command from the controller every millisecond. If the robot fails to receive a command packet in time for 20 steps in a row, this error is triggered and the robot stops operation for safety considerations. Common reasons include:
The CPU not being able to compute the controller outputs in time.
The network not being able to transfer the commands in time.
CPU performance (of the NUC)¶
First, confirm that the system is correctly running a real-time kernel:
The output of
uname -ashould contain the stringPREEMPT_RT./sys/kernel/realtimeshould exist and contain the number1.
Then, follow instructions to disable CPU frequency scaling.
It is recommended to have a minimum CPU spec of an 8th gen i7 processor to control a Franka robot with Polymetis.
Networking (between the NUC and the robot)¶
Run the simple ping test and the communication_test as documented in the libfranka docs here. The communcation_test command is installed with Polymetis and should be directly accessible in the command line.
End-to-end testing¶
To test real-time performance, start a polymetis server connected to a fake Franka robot with
launch_robot.py robot_client=franka_hardware robot_client.executable_cfg.mock=true
Then run
benchmark_control_latency.py
to measure statistics of the control loop time. Example output:
Control loop latency stats in milliseconds (avg / std / max / min):
Joint PD: 0.2243/ 0.0932 / 4.1315 / 0.1522
Cartesian PD: 0.3051/ 0.1358 / 5.9305 / 0.1383
The average should be well below 0.5 milliseconds in order to run on Franka hardware.
Inaccurate tracking performance¶
End-effector configuration¶
The gravity compensation onboard the Franka Robot relies on an accurate end-effector configuration within Desk, which can be accessed at Settings > End-Effector: 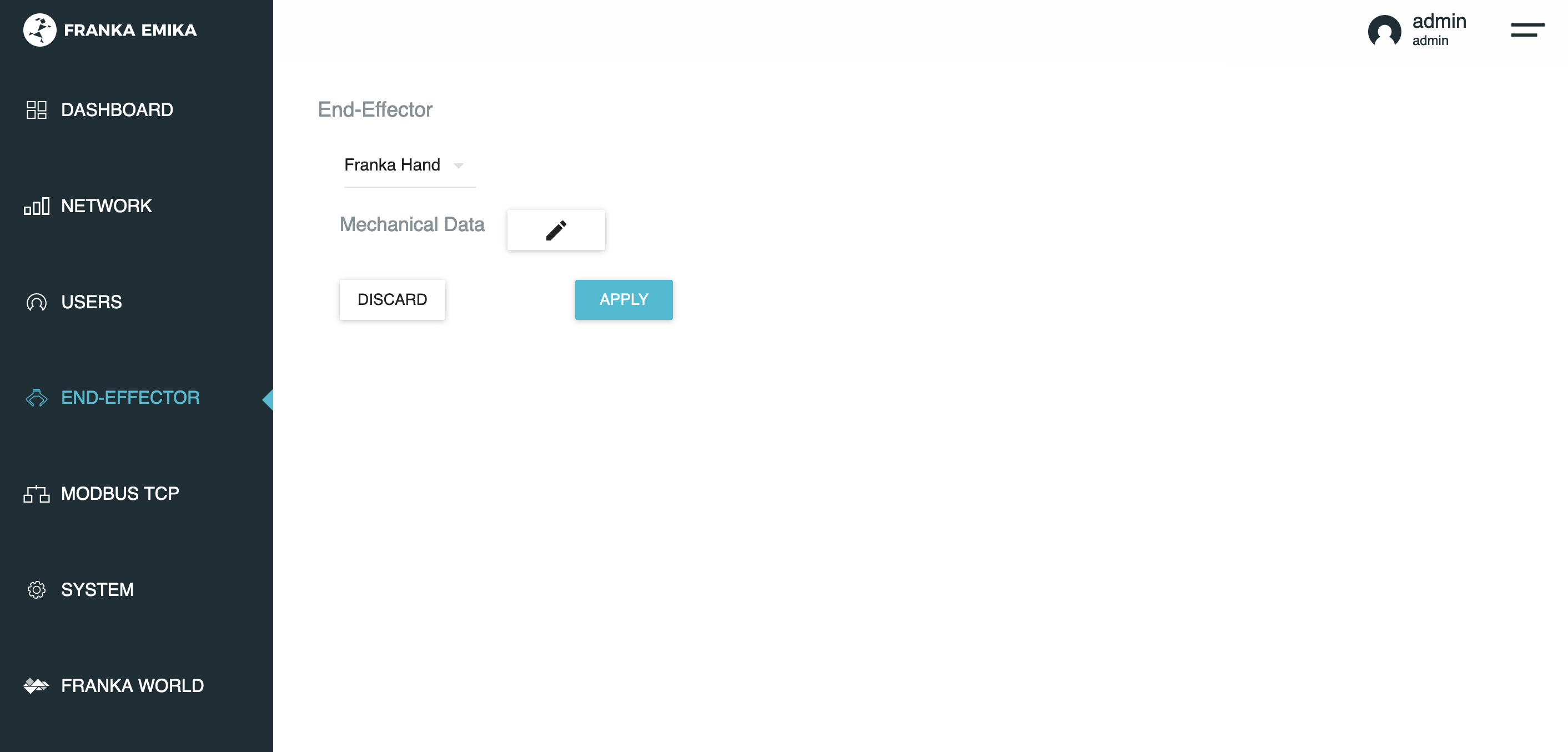 Desk provides configurations for the Franka Hand and for when no gripper is attached.
If you have a different gripper, or have force torque sensors or adapters installed, then you will need to supply the inertia fields using the end-effector type “Other”.
Desk provides configurations for the Franka Hand and for when no gripper is attached.
If you have a different gripper, or have force torque sensors or adapters installed, then you will need to supply the inertia fields using the end-effector type “Other”.