Examples
These instructions are for Aria Data Tools. We recommend using Project Aria Tools instead, wherever possible. It does not have the aria_multi_viewer utility for visualizing multiple time-synchronized recordings, but it is more up to date and will continue to be maintained. Getting Started With Aria Data Utilities in Project Aria Tools includes Jupyter Notebook Tutorials that can be run locally, or on Google Colab.
Introduction
The Aria Research Kit: Aria Data Tools provides Python3 code and a C++ library to work with VRS files.
The following examples provide specific scenarios for how to use the Project Aria Data Provider and how to visualize sequences and pre-computed camera trajectory.
Retrieve and Read Data Using the Project Aria Data Provider
Python
In this example, records are extracted and read for the Left SLAM Camera from recording.vrs.
For more information about the Project Aria Data Provider go to Accessing Sensor Data
1. Open and select the file to read
$ python
>>> import projectaria_tools as pyark
>>> vrs_data_provider = pyark.dataprovider.AriaVrsDataProvider()
>>> vrs_data_provider.openFile(‘recording.vrs’)
2. Select which sensor information to extract
Either through a high-level API:
vrs_data_provider.setSlamLeftCameraPlayer()
or with a StreamID:
>>> slam_camera_recordable_type_id = 1201
>>> slam_left_camera_instance_id = 1
>>> slam_left_camera_stream_id = pyark.dataprovider.StreamId(slam_camera_recordable_type_id, slam_left_camera_instance_id)
>>> vrs_data_provider.setStreamPlayer(slam_left_camera_stream_id)
3. Set whether to print data layouts (optional)
By default, data layouts are not printed while reading records. Set the verbosity to True to print data layouts and False to not print data layouts:
vrs_data_provider.setVerbose(True)
4. Read the data stream
All records in timestamp order, example command and output.
>>> vrs_data_provider.readAllRecords()
4822.486 Camera Data (SLAM) #1 [1201-1]: jpg, 44338 bytes. # JPEG compressed image data size before decompression
...
4832.286 Camera Data (SLAM) #1 [1201-1]: jpg, 64148 bytes.
4832.386 Camera Data (SLAM) #1 [1201-1]: jpg, 64174 bytes.
Read a single data record by timestamp:
vrs_data_provider.readDataRecordByTime(slam_left_camera_stream_id, someTimestamp)
You can also use a higher level API that reads a data record in a specific stream and proceeds next timestamp in the player internally.
vrs_data_provider.tryFetchNextData(slam_left_camera_stream_id)
5. Access the data stream
>>> slam_left_camera_player = vrs_data_provider.getSlamLeftCameraPlayer()
>>> slam_left_camera_data_record = slam_left_camera_player.getDataRecord()
>>> slam_left_camera_data_record.captureTimestampNs
4832385508212
>>> slam_left_camera_data = slam_left_camera_player.getData()
>>> pixel_frame = slam_left_camera_data.pixelFrame
>>> buffer = pixel_frame.getBuffer()
>>> len(buffer)
307200 # JPEG image data decompressed internally in AriaImageSensorPlayer
# equal to SLAM camera image width (640) * image height(480)
6. Read the first configuration record of a stream:
vrs_data_provider.readFirstConfigurationRecord(slam_left_camera_stream_id)
7. Load the device model
There are calibration strings for each image and motion stream. Reading the configuration record for any one of them will load the device model.
>>> slam_left_camera_stream_id = slam_left_camera_player.getStreamId()
>>> slam_left_camera_stream_id
<pyark.dataprovider.StreamId object at 0x7f955808c270>
>>> vrs_data_provider.readFirstConfigurationRecord(slam_left_camera_stream_id)
True
>>> vrs_data_provider.loadDeviceModel()
True
>>> device_model = vrs_data_provider.getDeviceModel()
>>> device_model
<pyark.sensors.DeviceModel object at 0x7f955808c2b0>
C++
Use the following commands to verbosely read all or some data streams in a Project Aria VRS file.
$ cd build/data_provider
$ ./read_all <vrs_path> # Read records of all streams verbosely
$ ./read_selected <vrs_path> # Read records of selected streams verbosely
Visualizing Sequences and Pre-Computed Camera Trajectory
Use the following commands to run the Visualization Tool:
Python
$ cd src/visualization
$ python3.9 main.py ${vrs_path} ${optional_pose_path} ${optional_eyetracking_path} ${optional_speechtotext_path}
C++
$ cd build/visualization
$ ./aria_viewer ${vrs_path} ${optional_pose_path} ${optional_eyetracking_path} ${optional_speechtotext_path}
Pose, eye tracking and speech2text paths are optional. If they are not provided, the visualization tool will try to infer the full paths of trajectory.csv, et_in_rgb_stream.csv and speech_aria_domain.csv from the VRS path by using the Aria Pilot Dataset structure:
├── location
│ └── trajectory.csv
├── eyetracking
│ └── et_in_rgb_stream.csv
├── speech2text
│ └── speech_aria_domain.csv
├── ${vrs_path}
└── ...
You will see something like the image below in the viewer after you press the Play button.
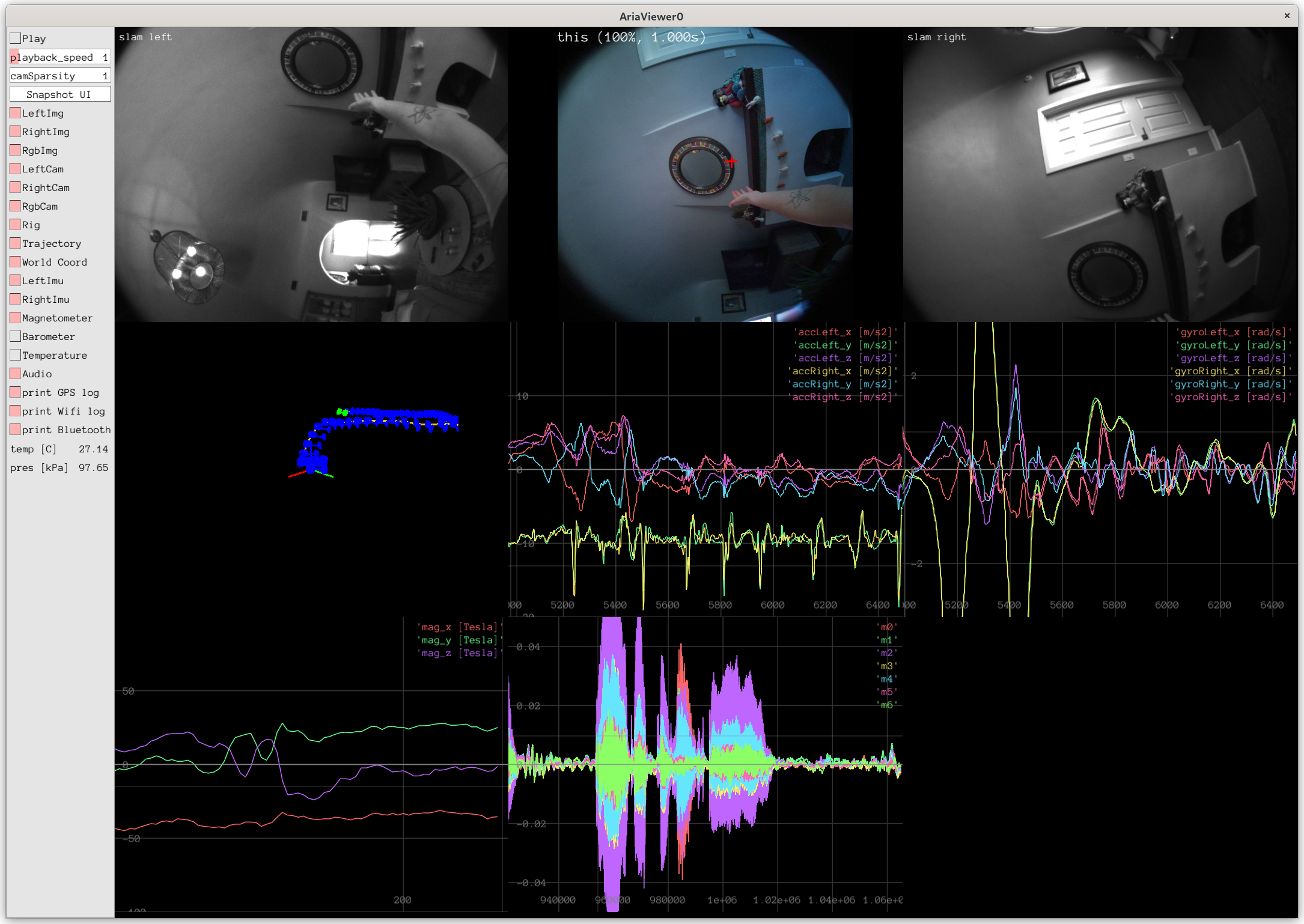
For more information, about this tool, go to Visualize Sequences and Pre-Computed Camera Trajectory