Contributing to PyTouch
We welcome the touch sensing community to contribute new tasks to the PyTouch library.
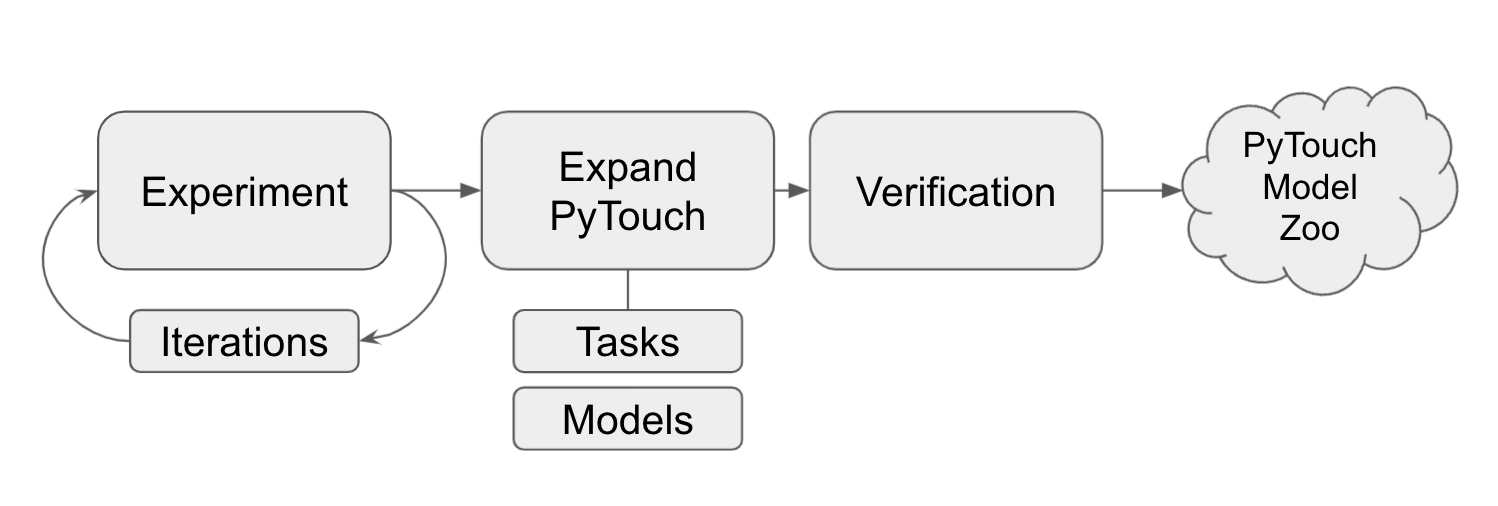
Experiment#
Perform your experiment with any suitable platform and export the models as PyTorch models or ONNX models.
PyTouch Model#
Create a new model file task_name.py in pytouch/models. This model file can contain the necessary setup for initializing from pre-trained weights and parameters.
PyTouch Task#
Create a new task file task_name.py in pytouch/tasks.
An example template for a task,
Verification#
Create a new PR on the GitHub repository and provide the following info:
- Model file(s)
- Model description
- Model performance information
Submission#
Upon PR acceptance, the model files will be available through the PyTouch Model Zoo.