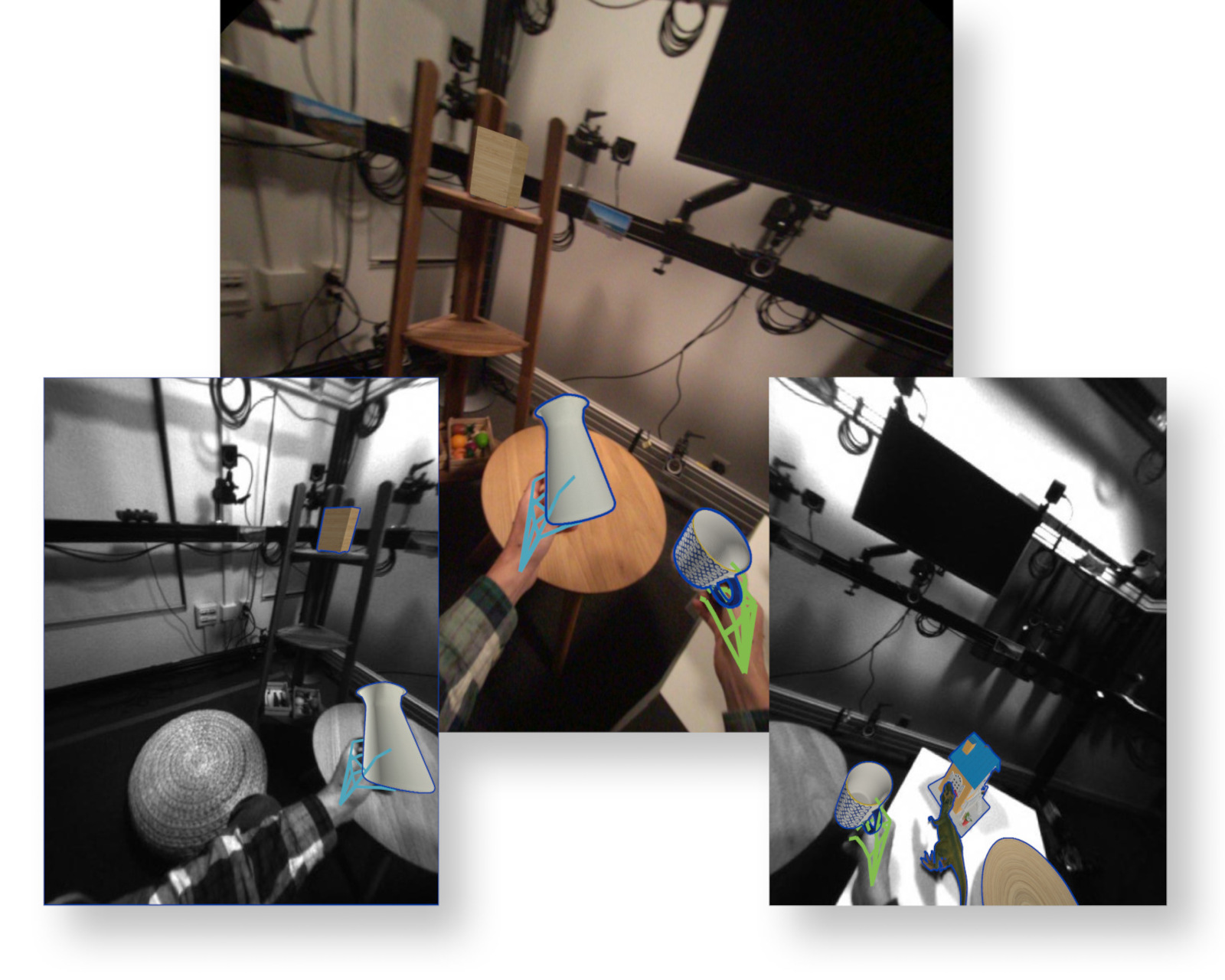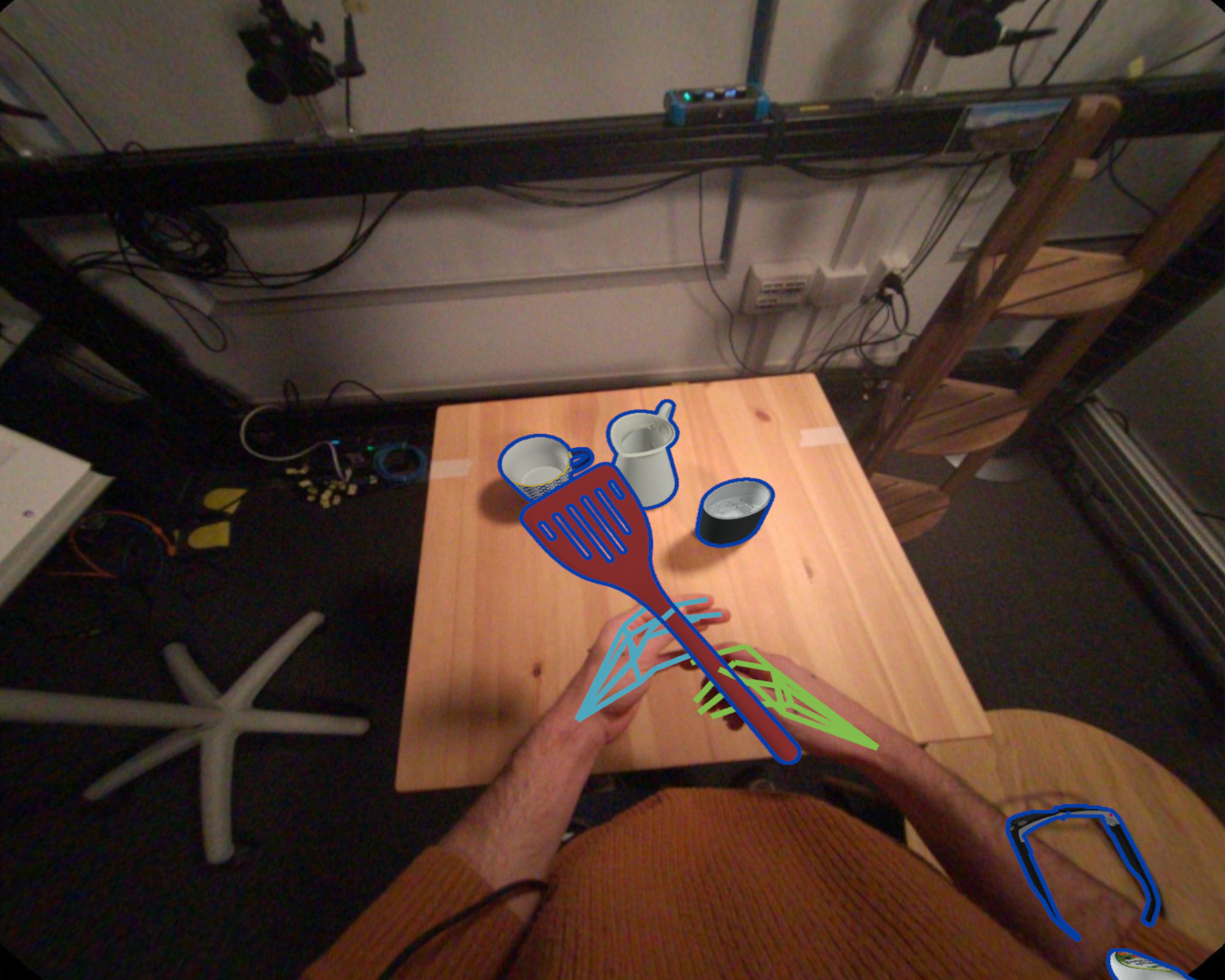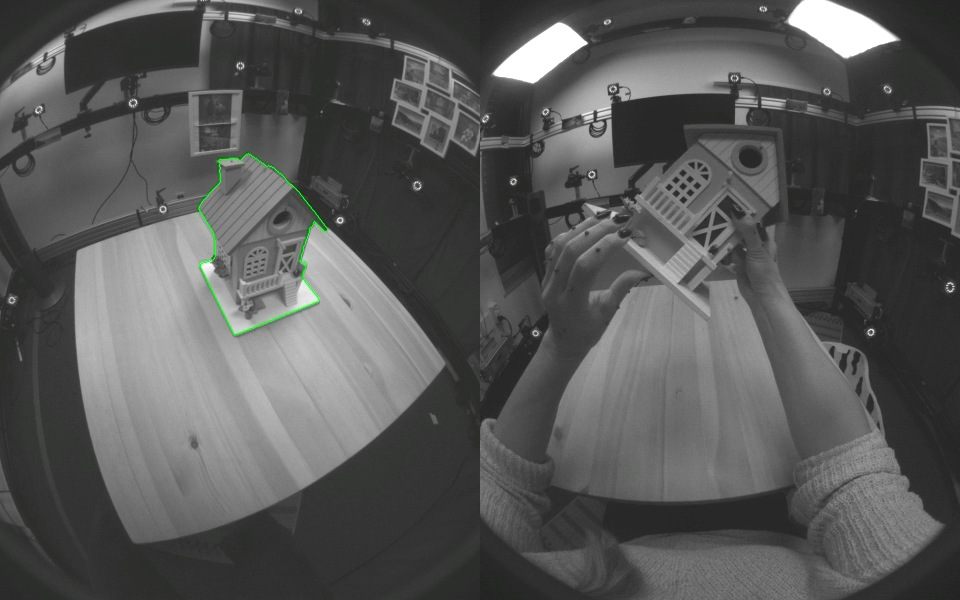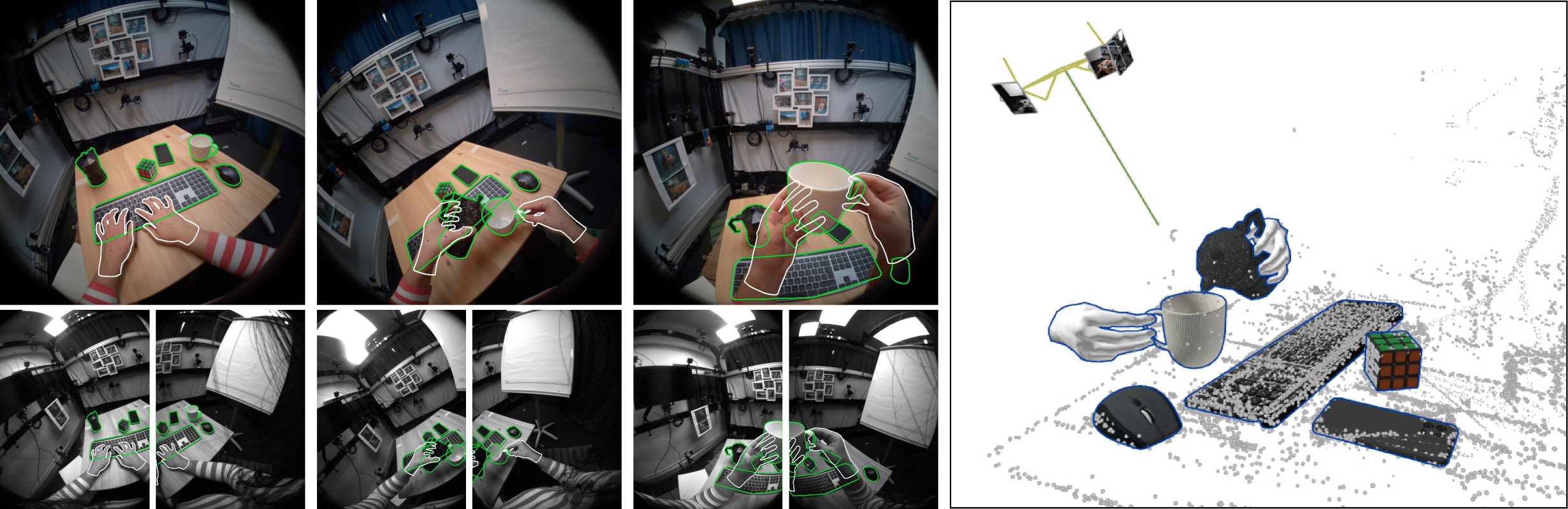
HOT3D is a dataset for benchmarking egocentric tracking of hands and objects in 3D. The dataset includes 833 minutes of multi-view image streams, which show 19 subjects interacting with 33 diverse rigid objects and are annotated with accurate 3D poses and shapes of hands and objects. HOT3D is recorded with two head-mounted devices from Meta: Project Aria, a research prototype of light-weight AR/AI glasses, and Quest 3, a production VR headset sold in millions of units. We aim to support research on egocentric hand-object interaction by making HOT3D publicly available and by co-organizing public challenges on the dataset.
A website focusing on the HOT3D content from Project Aria is available at projectaria.com.